In the realm of energy and transportation, a team of researchers from the KTH Royal Institute of Technology in Sweden has developed a novel approach to enhance the security of vehicular platooning, a technique that could significantly improve the efficiency and safety of road transportation. The researchers, Konstantinos Kalogiannis, Ahmed Mohamed Hussain, Hexu Li, and Panos Papadimitratos, have introduced a system called Attention In Motion (AIMformer) that aims to detect misbehavior in platooning vehicles in real-time.
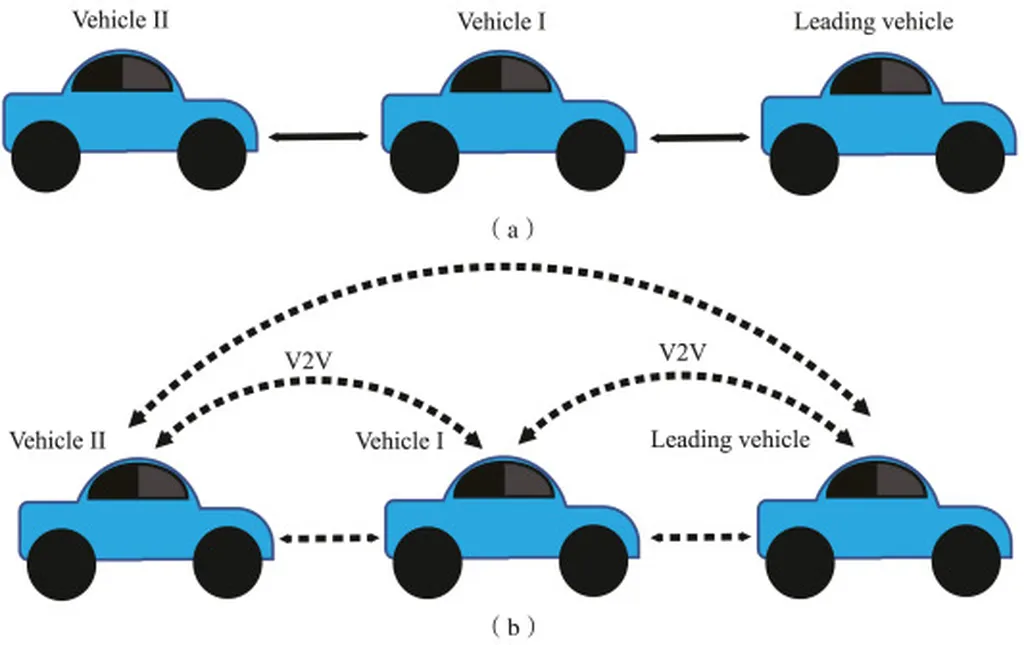
Vehicular platooning involves groups of vehicles traveling together in a coordinated manner, using Vehicle-to-Everything (V2X) communication to maintain safe distances and speeds. This approach can reduce fuel consumption, decrease traffic congestion, and improve overall road safety. However, the distributed nature of platoon coordination also creates security vulnerabilities. Authenticated vehicles could potentially inject falsified kinematic data, compromising the stability of the platoon and posing a threat to passenger safety.
Traditional methods of detecting such misbehavior, which rely on plausibility checks and statistical methods, often result in high false positive rates and fail to capture the complex temporal dependencies in multi-vehicle coordination. The researchers addressed these issues by developing AIMformer, a transformer-based framework specifically designed for real-time misbehavior detection in vehicular platoons. The system leverages multi-head self-attention mechanisms to capture both intra-vehicle temporal dynamics and inter-vehicle spatial correlations.
AIMformer also incorporates global positional encoding with vehicle-specific temporal offsets to handle join and exit maneuvers. The researchers proposed a Precision-Focused Binary Cross Entropy (BCE) loss function that penalizes false positives, a critical requirement for safety-critical vehicular systems. Extensive evaluations across various platoon controllers, attack vectors, and mobility scenarios demonstrated that AIMformer outperforms state-of-the-art baseline architectures with a performance metric of 0.93 or higher.
The researchers also conducted a comprehensive deployment analysis using TensorFlow Lite (TFLite), Open Neural Network Exchange (ONNX), and TensorRT, achieving sub-millisecond inference latency. This makes AIMformer suitable for real-time operation on resource-constrained edge platforms, validating its viability for both in-vehicle and roadside infrastructure deployment. The research was published in the Proceedings of the ACM on Interactive, Mobile, Wearable and Ubiquitous Technologies.
For the energy sector, the practical applications of this research are significant. By improving the safety and efficiency of vehicular platooning, AIMformer can contribute to reducing fuel consumption and emissions, aligning with the energy industry’s goals of promoting sustainable transportation solutions. Additionally, the system’s ability to operate on edge platforms makes it a cost-effective and scalable solution for widespread adoption.
This article is based on research available at arXiv.